麻省理工学院创新机器人控制技术:没有传感器
- 编辑:admin -麻省理工学院创新机器人控制技术:没有传感器
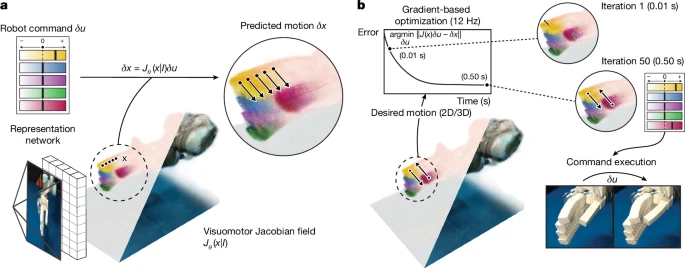 它是在7月13日的新闻中,麻省理工学院团队提出了一种基于视觉的深度学习方法,该方法允许软件和仿生机器人通过相机学习运动和控制。预计这一技术进步将大大降低机器人开发的成本,并于6月25日在自然主题上发布了相关结果。该软件和仿生机器人具有环境适应性的优势,但通常取决于大量的自定义空间和型号。现在,麻省理工学院团队通过深度学习技术解决了这一不一致。新系统简单地通过单个摄像头捕获机器人运动图像,并结合了一种称为“ Neurojacobian Field(NJF)”的技术,以允许机器人通过视觉反馈来建立自己的形态和运动技能。研究人员在多个机器人中进行了2-3个小时的随机运动训练,并允许成功的神经网络重建三维形态和范围Of机器人在单个图像中移动。该系统已在诸如软轮胎机器人,原始机器人(16个自由度),印刷在3D和低成本罂粟机器人臂上的机器人臂中实现。关节运动误差小于3度,指尖的控制误差小于4 mm,并且可以适应MIT MIT的动态变化。 Csail总监Daniela Rus补充说:“作为弹性传感器的可见性为在非结构化环境(例如农场和建筑工地)中的机器人应用开辟了新的可能性。
它是在7月13日的新闻中,麻省理工学院团队提出了一种基于视觉的深度学习方法,该方法允许软件和仿生机器人通过相机学习运动和控制。预计这一技术进步将大大降低机器人开发的成本,并于6月25日在自然主题上发布了相关结果。该软件和仿生机器人具有环境适应性的优势,但通常取决于大量的自定义空间和型号。现在,麻省理工学院团队通过深度学习技术解决了这一不一致。新系统简单地通过单个摄像头捕获机器人运动图像,并结合了一种称为“ Neurojacobian Field(NJF)”的技术,以允许机器人通过视觉反馈来建立自己的形态和运动技能。研究人员在多个机器人中进行了2-3个小时的随机运动训练,并允许成功的神经网络重建三维形态和范围Of机器人在单个图像中移动。该系统已在诸如软轮胎机器人,原始机器人(16个自由度),印刷在3D和低成本罂粟机器人臂上的机器人臂中实现。关节运动误差小于3度,指尖的控制误差小于4 mm,并且可以适应MIT MIT的动态变化。 Csail总监Daniela Rus补充说:“作为弹性传感器的可见性为在非结构化环境(例如农场和建筑工地)中的机器人应用开辟了新的可能性。

